Kansei Robots
Not Just Smart Robots—Lifelike Robots!
In recent years, robots have become more familiar in our daily lives. In particular, communication robots like Sony’s “AIBO” and SoftBank’s “Pepper” have attracted attention. These robots respond to human speech and interact with us through gestures, emotional expressions, and conversation, providing entertainment and engagement. However, it’s hard to say that such robots have truly become widespread in our everyday lives. Although they initially gained popularity due to their novelty, their appeal has gradually faded. Why have communication robots struggled to secure a lasting place in society?
One possible reason is that users quickly lose interest in them because their behaviors are too mechanical and simplistic. That’s why the development of robots that exhibit lifelike behavior—robots that understand and embody the sensitivities of humans and animals—is becoming increasingly important.

Robots with Emotions
Our lab conducts research focused on the keyword "Emotions". Emotions are an essential part of human nature and play a critical role in communication between people. Therefore, for a robot to understand human sensitivity and build friendly relationships with people, it needs to have the function of "emotion."
The presence or absence of such lifelike emotional functions creates a significant distinction between humans and robots. In other words, by giving robots emotions, they can become more familiar and relatable to humans.
Can Robots Grow Too?
An “emotion generation model” is a system that determines what kind of emotions a robot should generate in response to various stimuli. Researchers around the world are studying emotion generation models for robots. However, most of this research focuses on how robots with complex and pre-defined sets of emotions can select the most appropriate one in a given situation.
In our lab, we focus on a new perspective: the “development” of living beings. By giving robots the ability to gradually develop emotions as humans do during growth, we aim to create a more lifelike emotion generation process.

Robots with Needs
We are also conducting research focusing on innate biological factors and “needs,” such as sleepiness and hunger. In real living beings, strong emotions like “frustration” or “anger” can arise from desires such as hunger or the need to eat. Therefore, these elements are deeply connected to emotions as well.
An imperfect robot
Furthermore, research is being conducted to enhance the human-likeness of robots by deliberately incorporating imperfect behaviors, such as hesitation or indecision. Traditional robots tend to execute instructed actions or speech in a straightforward and mechanical manner, which makes it difficult to describe their behavior as human-like. As a result, users may perceive the robot as merely a machine, making it hard to develop a sense of familiarity or emotional attachment, thereby hindering long-term engagement. To address this, the aim is to intentionally design imperfect behaviors in robots so that humans are more likely to feel a sense of warmth and approachability toward them.
Related Work
Adaptive Psychological Distance in Japanese Spoken Human-Agent Dialogue: A Politeness-Based Management Model
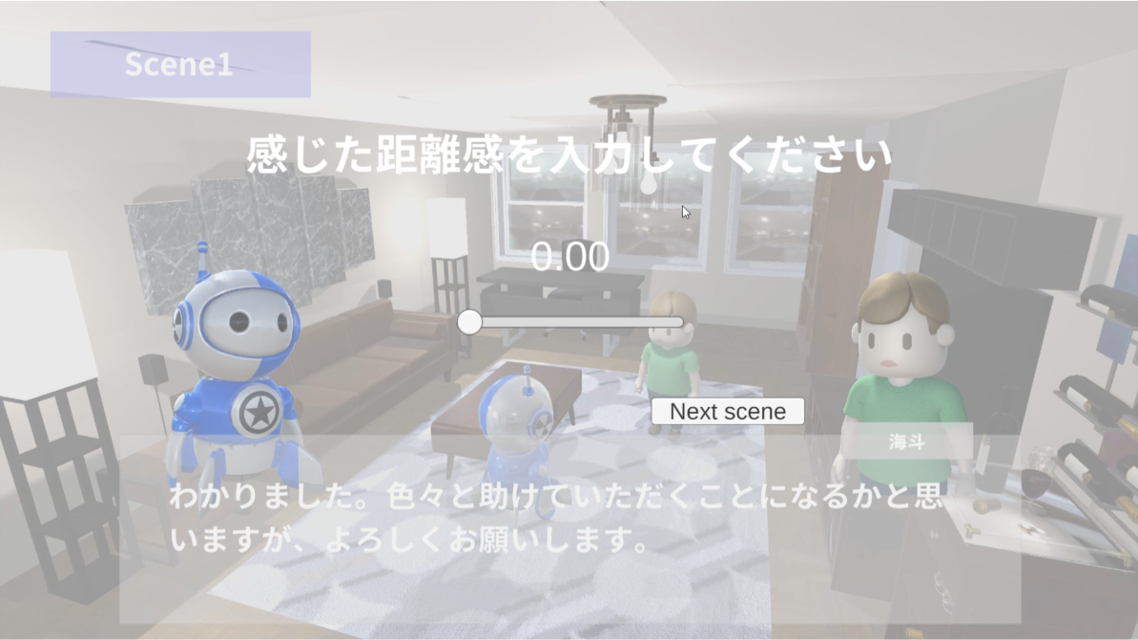
In this study, we propose a computational model that enables more human-like dialogue by dynamically adjusting the perceived social distance in human-robot conversations, based on politeness theory. Traditional robots often employ a generic, static conversational style that cannot adapt to changes in the level of intimacy, which contributes to the impression of mechanical interaction. To address this, our model systematically manipulates "linguistic politeness markers" and "conversational strategies" in Japanese dialogue contexts to realize psychological distance between the robot and the human. This research offers insights into interaction design in contexts like Japanese communication, where social distance is linguistically formalized, thereby contributing to the field of HCI. Furthermore, it is expected to deepen our understanding of how conversational agents can achieve more natural and context-aware interactions that align with human social expectations.
Verification of immersive experience through watching with robot groups considering emotional contagion

In this study, we focus on nonverbal information in human-robot communication and propose a virtual sports viewing environment using a group of robots that induce a sense of presence by altering emotions through emotional contagion. Since the global outbreak of COVID-19 in 2020, various methods of watching sports have gained attention. However, traditional viewing methods fail to reproduce the communication that occurs on-site, resulting in a lack of presence. To address this, our system deploys a group of robots programmed to dynamically express emotions through an emotional contagion model. By incorporating this approach, we aim to enhance the user's sense of immersion and satisfaction by accommodating nuances in emotional transmission and individual preferences.
References
Miho Harata, Masataka Tokumaru, “An emotion generation model with growth functions for robots”, Journal of Advanced Computational Intelligence and Intelligent Informatics, Vol.17, No.2, pp.335-342, 2013-03.
Kinoshita, S., Takenouchi, H., & Tokumaru, M. (2014). 対話者を考慮した反応を行うロボットの感情生成モデル [Emotion generation model for robots responding with consideration of dialogue partners]. Proceedings of the 30th Fuzzy Systems Symposium of the Japanese Society for Fuzzy Theory and Intelligent Informatics, TA1-4, 342–347.
Nagano, H., & Tokumaru, M. (2013). 発達機能を持つロボットにおける長期的なインタラクションによる感情分化の検証 [Verification of emotional differentiation through long-term interaction with robots possessing developmental functions]. Proceedings of the 29th Fuzzy Systems Symposium of the Japanese Society for Fuzzy Theory and Intelligent Informatics, MC3-1, 123–128.
Akira Inaba, Emmanuel Ayedoun, Masataka Tokumaru, “Adaptive Psychological Distance in Japanese Spoken Human-Agent Dialogue: A Politeness-Based Management Model”, The 15th International Workshop on Spoken Dialogue Systems Technology, 2025-05 (Bilbao, Spain) (to appear).
Yamamoto, F., Ayedoun, E., & Tokumaru, M. (2024). 感情伝播を考慮したロボット集団との観戦による臨場感演出の検証 [Verification of immersive experience through watching with robot groups considering emotional contagion]. Proceedings of the 34th Soft Science Workshop of the Japanese Society for Fuzzy Theory and Intelligent Informatics, 4–2.








