感性ロボット
賢いロボットよりも,生き物らしいロボットを!
近年,ロボットが身近な存在となってきています.特に,ソニー株式会社の「AIBO」や,ソフトバンク株式会社の「Pepper」のようなコミュニケーションロボットも注目されています.これらのロボットは人間の言葉などに反応し,ジェスチャーや感情表出,発話によって私たちを楽しませてくれます.しかし,これらロボットは私たちの生活に十分に普及しているとは言えません.発売当初はその珍しさから注目されましたが,次第に人気を失いつつあります.なぜコミュニケーションロボットはその地位を確立できなかったのでしょうか?
理由の一つとして,ロボットが機械的・単純であったりすることで,ユーザがすぐに飽きてしまうということが考えられます.そこで,人間や動物のような感性を理解し身に付けた,生き物らしい振る舞いをするロボットの存在が重要となります.

感情を持ったロボット
本研究室では「感情」というキーワードに着目した研究を行っています.「感情」は,人間が生まれながらに持つ重要な要素であり,人間同士がコミュニケーションを取る際にも非常に重要な役割を果たします.そのため,感性を理解し人と仲良くなれるロボットには,「感情」という機能が必要になります.
こうした生き物らしい「感情」を生み出す機能の有無こそが人やロボットの大きな違いを生み出します.つまり,ロボットに「感情」を持たせることで,ロボットは人間にとって親しみ深い存在になることができるのです.
ロボットも成長する?
「感情生成モデル」とは,ロボットが何らかの刺激を受けた時,どのような感情を生み出すのかを決定するシステムを指します.世界中の研究者がロボットの感情生成モデルについて研究していますが,それらの研究のほとんどは複雑で多数の感情を予め持つロボットが刺激に対して如何にうまく感情を選択するかに着目しています.
本研究室では,生き物の「発達」という新しいポイントに着目して感情生成モデルを構築しています.人が成長する過程で徐々に感情が発達していく様子をロボットにも与えることで,より生き物らしい感情生成を目指しています.

欲求を持つロボット
また,眠気や空腹などの「生理的要因」や「欲求」といった生き物が生まれつき持つものに着目した研究も行っています.実際の生き物は, 空腹や食事に対する欲求から「苛立ち」や「怒り」などの強い感情を感じる場合があります.そのため,これらの要素も感情と深い関係を持っているのです.
不完全なロボット
さらに,ロボットの人間らしさを向上させるために,言い淀んだり悩んだり等の不完全な動作を行わせる研究も行っています.従来のロボットは,指示された動作や発話を淡々と実行する性質を持つため,人間らしい行動をしているとは言えません.このままではユーザはロボットが機械的に見えてしまい親しみを持つことが難しく,長期的な利用を促すことができません.そこで,ロボットに敢えて不完全な動作を演出させることで,人間がロボットに対して親しみやすさを抱きやすくなることを目指しています.
今後,ロボットへモデルを実装し実際の人間とのコミュニケーションを行っていくことで,新たな知見を獲得し,より生き物らしいロボットの感情表現を生み出せることに期待が集まっています.
関連研究紹介
ユーザの嗜好に応じて心理的距離を調整する会話制御モデルに関する研究
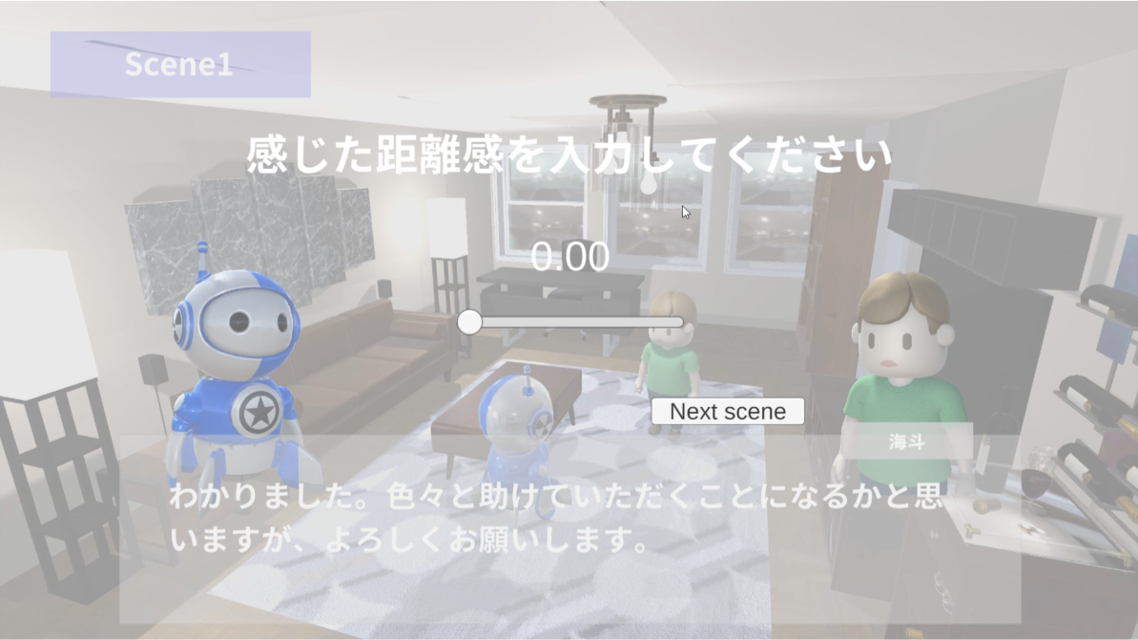
本研究では,ポライトネス理論に基づき,人間とロボットの会話における「距離感」を動的に調整することで,より人間に近い対話を可能にする計算モデルを提案しています.従来ロボットの一般的で静的な会話スタイルでは,親密さのレベル変化に適応できず,機械的であると感じられる一因となっています.そこで本モデルは,日本語の対話文脈における「言語的ポライトネスマーカー」と「会話ストラテジー」を系統的に操作することで,ロボットと人間の心理的距離を実現しています.本研究は,日本語のコミュニケーションのように社会的距離が言語的に形式化されている文脈におけるデザインへの示唆を提供することで、HCI分野に貢献できます.また,会話エージェントが人間の社会的期待に沿った,より自然かつ文脈を考慮したインタラクションを実現する方法について,理解を深めることが期待できます.
感情伝搬を考慮したロボット集団との観戦による臨場感演に関する研究

本研究では,ロボットとのコミュニケーションにおける「非言語情報」に注目し,感情伝播により感情を変化させることで臨場感を誘発するロボット群を用いた仮想スポーツ観戦環境を提案しています.近年,2020年に世界的に発生したCOVID-19の流行をきっかけに,様々なスポーツ観戦方法が注目されるようになっています.しかし,従来の観戦手法では,現地で行われるコミュニケーションを再現することができず,臨場感が得られません.そこで本システムでは,感情伝播モデルによって動的に感情を表現できるようにプログラムされたロボット群を配置しています.本研究により,感情伝搬のニュアンスや個人の嗜好に対応することで,システム利用者の没入感や満足度の向上が期待できます.
参考文献
Miho Harata, Masataka Tokumaru, “An emotion generation model with growth functions for robots”, Journal of Advanced Computational Intelligence and Intelligent Informatics, Vol.17, No.2, pp.335-342, 2013-03.
永野 裕美,徳丸 正孝,“発達機能を持つロボットにおける長期的なインタラクションによる感情分化の検証”,日本知能情報ファジィ学会 第29回ファジィシステムシンポジウム,MC3-1,pp.123-128,2013-09(大阪).
木下 晶介,竹之内 宏,徳丸 正孝,“対話者を考慮した反応を行うロボットの感情生成モデル”,日本知能情報ファジィ学会 第30回ファジィシステムシンポジウム,TA1-4, pp.342-347, 2014-09(高知).
山本 楓真,アイエドゥン エマヌエル,徳丸 正孝,”感情伝播を考慮したロボット集団との観戦による臨場感演出の検証”, 日本知能情報ファジィ学会 第34回ソフトサイエンス・ワークショップ,4-2,2024-03(金沢).
Akira Inaba, Emmanuel Ayedoun, Masataka Tokumaru, “Adaptive Psychological Distance in Japanese Spoken Human-Agent Dialogue: A Politeness-Based Management Model”, The 15th International Workshop on Spoken Dialogue Systems Technology, 2025-05 (Bilbao, Spain) (to appear).








